Stability Under Scrutiny: Benchmarking Representation Paradigms for Online HD Mapping
Abstract
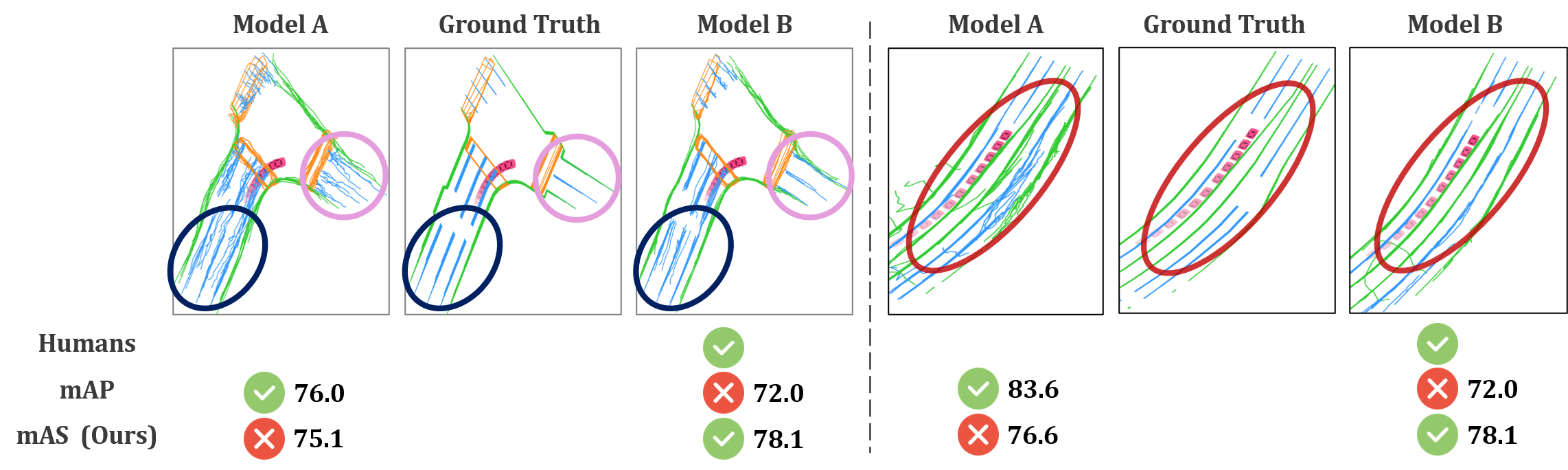
As one of the fundamental modules in autonomous driving, online high-definition (HD) maps have attracted significant attention due to their cost-effectiveness and real-time capabilities. Since vehicles always cruise in highly dynamic environments, spatial displacement of onboard sensors inevitably causes shifts in real-time HD mapping results, and such instability poses fundamental challenges for downstream tasks. However, existing online map construction models tend to prioritize improving each frame's mapping accuracy, while the mapping stability has not yet been systematically studied. To fill this gap, this paper presents the first comprehensive benchmark for evaluating the temporal stability of online HD mapping models. We propose a multi-dimensional stability evaluation framework with novel metrics for Presence, Localization, and Shape Stability, integrated into a unified mean Average Stability (mAS) score. Extensive experiments on 42 models and variants show that accuracy (mAP) and stability (mAS) represent largely independent performance dimensions. We further analyze the impact of key model design choices on both criteria, identifying architectural and training factors that contribute to high accuracy, high stability, or both. To encourage broader focus on stability, we will release a public benchmark. Our work highlights the importance of treating temporal stability as a core evaluation criterion alongside accuracy, advancing the development of more reliable autonomous driving systems.
Test Result
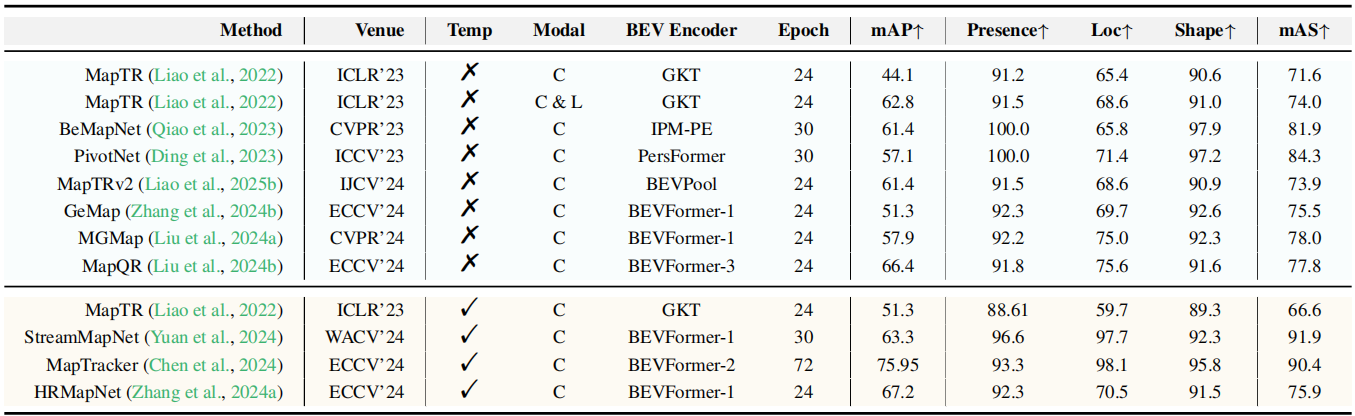
Basic Benchmarking of HD Map Constructors. comparison of online HD mapping methods on nuScenes val set. Models grouped by temporal fusion mechanisms, input modality, BEV encoder and training epochs. “Temp" denotes the injection of temporal information. “L” and “C” represent LiDAR and camera respectively, while the 2D and 3D backbones employ ResNet50 and SECOND, correspondingly.
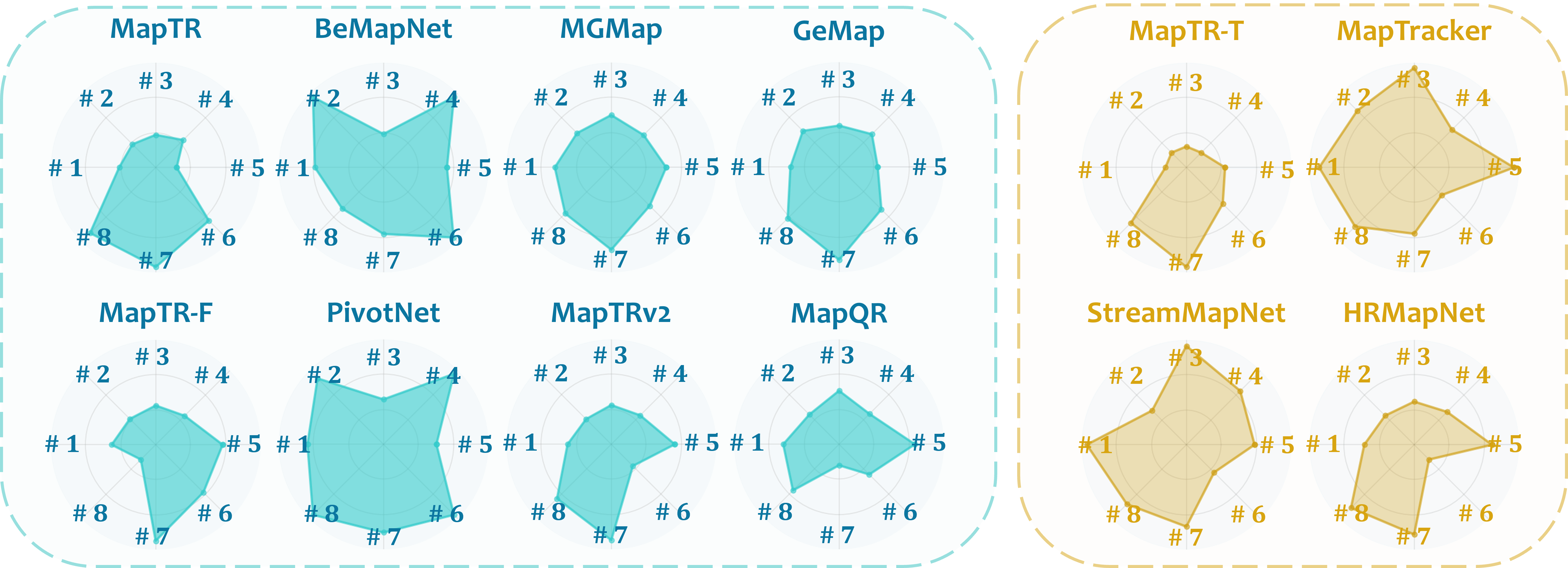
Radar chart for Basic HD map constructors covering eight evaluation metrics. The axes of the radar chart correspond to: #1 mAS, #2 Shape, #3 Loc, #4 Presence, #5 mAP, #6 Inference Memory Cost, #7 Parameter Count, #8 FPS.
Impact on Downstream Tasks
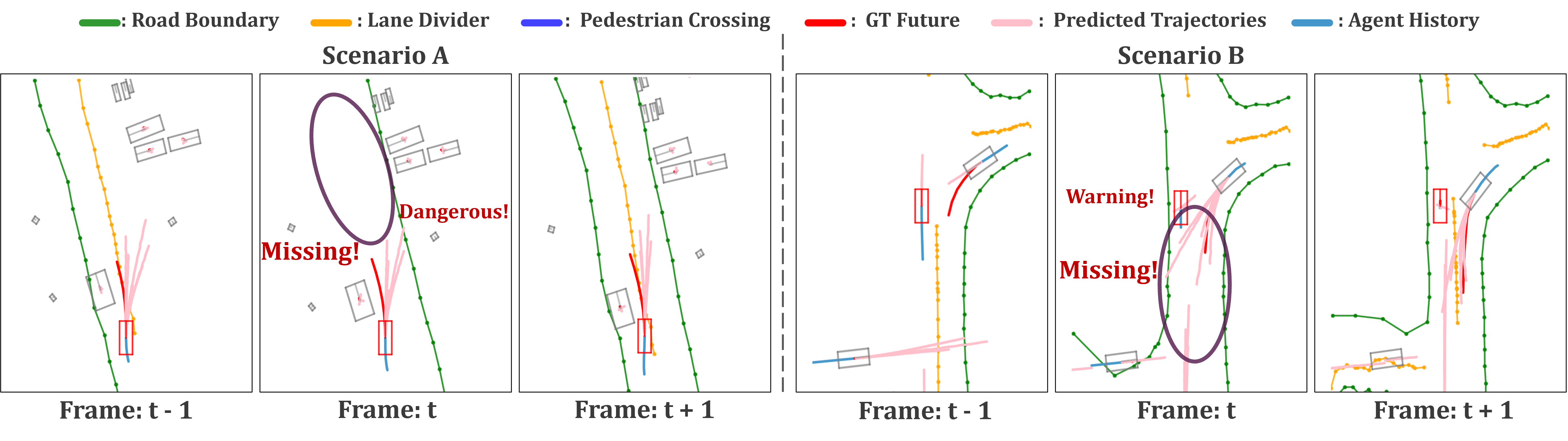
The impact of unstable map elements on downstream tasks. In Scenario A, the ego vehicle attempts to overtake, but the forward lane divider suddenly disappears during the maneuver, causing the ego vehicle to steer toward the curb. In Scenario B, another vehicle attempts to change lanes, but due to flickering lane dividers in the ego vehicle's perception, the ego vehicle interprets the other vehicle's action as a collision course.
Visual Results
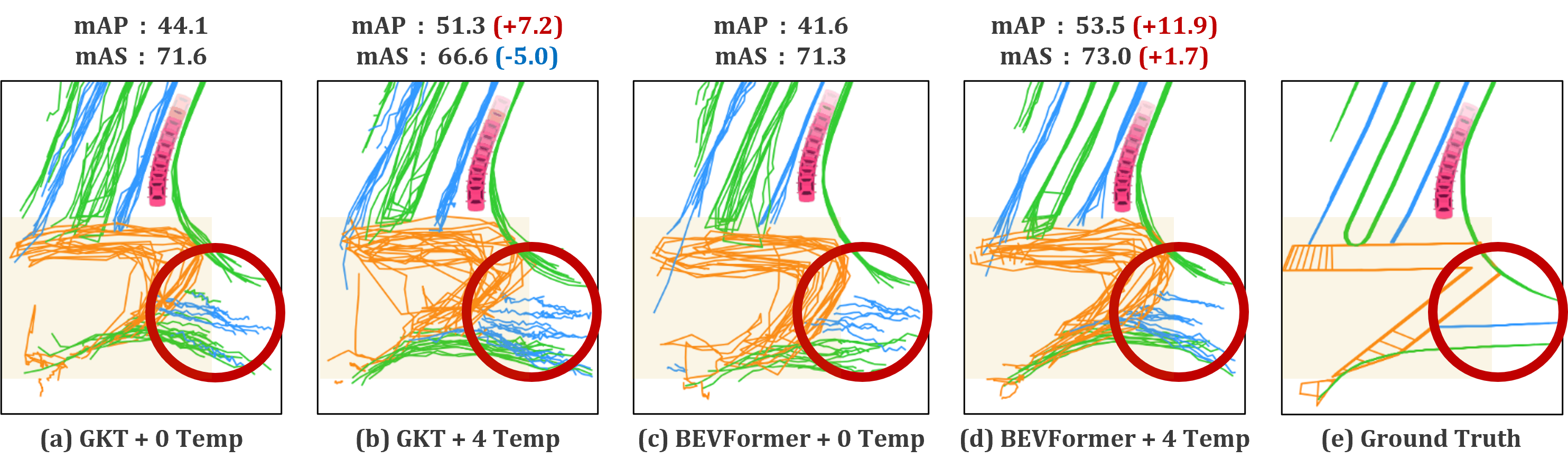
Discussion of Temporal Fusion. The effectiveness of temporal fusion is highly dependent on architectural compatibility.